Naval Architecture And Ocean Engineering
Lab지능형해양시스템 연구실
연구 분야
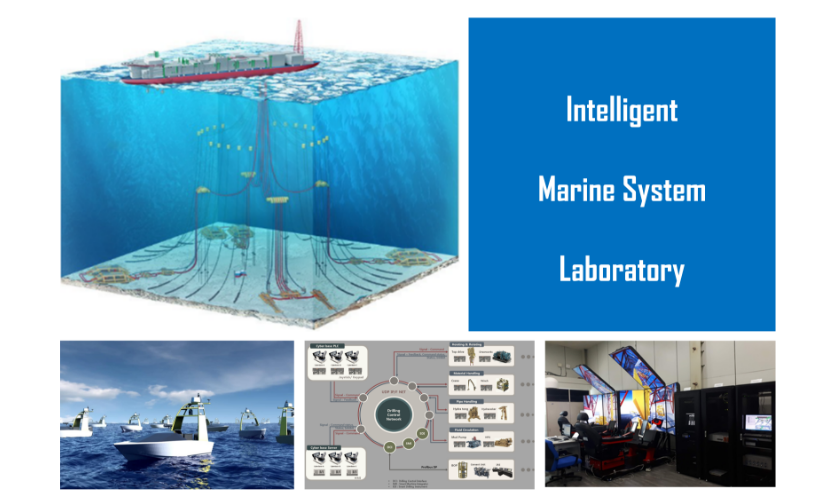
자율운항 선박을 포함한 다양한 종류의 해양시스템이 목표로 한 성능을 최대한 발휘할 수 있도록 하는 제어에 관해 연구와 실습을 할 수 있는 연구실입니다. 바다에서 바람, 파도, 그리고 조류와 함께 얼음 등에 의해 선박이나 해양구조물에 과도한 힘이 가해지는 상황에서 경로 추종이나 위치를 유지하는 방법을 개발하고 있습니다. 또한 해양 시추와 관련된 장비들을 시뮬레이션 할 수 있는 시스템을 구비하고 있습니다. 이를 통하여 선박 운항 시뮬레이터와 해양 시추 시뮬레이터를 연동하여 바다에서 발생하는 여러가지 기상 상황을 연출하고 시뮬레이션 할 수 있는 방법을 개발하고 있습니다.
Dynamic positioning system in harsh environment
얼음이 있는 해역 등 해양 환경 하중이 과도하게 작용하는 곳에서의 동적위치유지 시스템의 제어 방법에 관한 사항을 연구하고 있습니다.
- DP in ice conditions
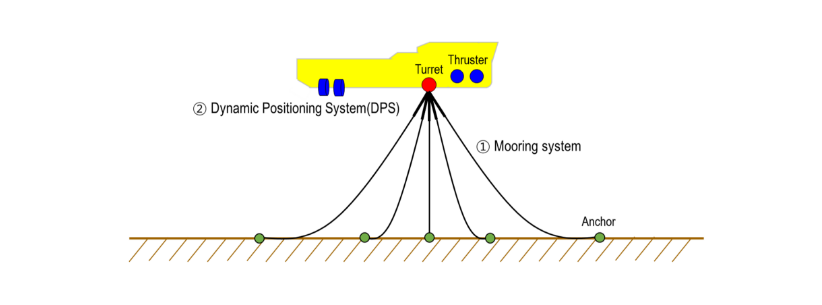
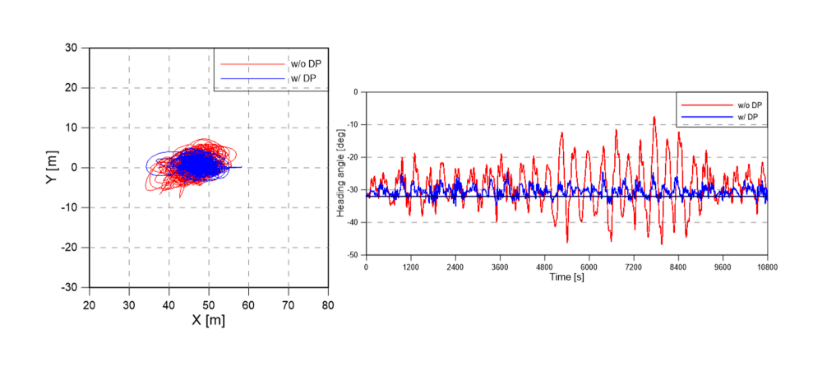
극지에서는 얼음에 의한 영향으로 부유식 구조물이 제자리를 유지하는 것이 어렵습니다. 따라서 계류시스템과 동적위치유지시스템을 결합한 위치유지 방법을 이용하게 됩니다.
얼음의 이동이 해양구조물의 위치유지에 미치는 영향을 평가하기 위하여 여러 가지 시나리오를 구성하여 시간 영역에서의 시뮬레이션을 수행하고 있습니다.
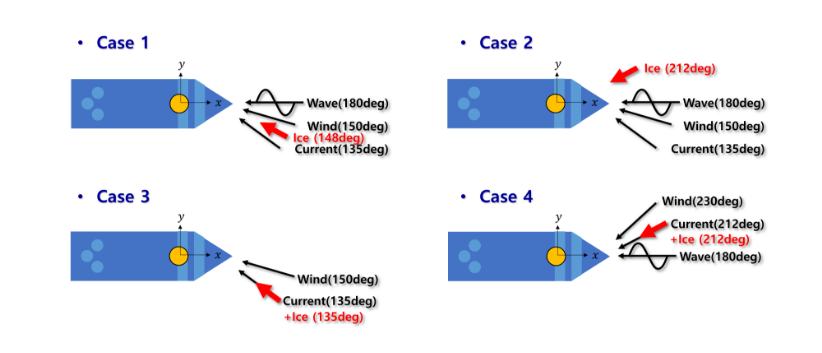
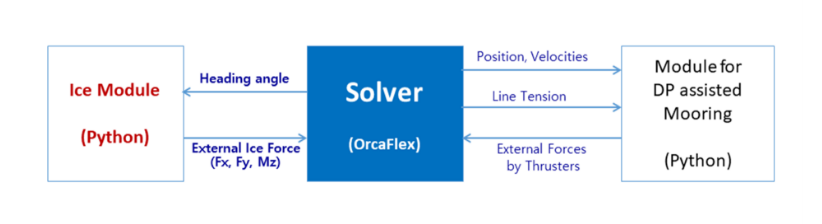
해양시스템의 동역학 해석에 관한 상용소프트웨어인 OrcaFlex에 파이썬을 이용하여 dynamic positioning과 관련한 제어 모듈과 빙하중등의 외력이 추가로 입력될 수 있도록 모듈화 하였습니다. 이를 이용하여 해양 부유체의 위치유지 성능을 평가하는 방법을 연구하고 있습니다.
- Conventional analysis
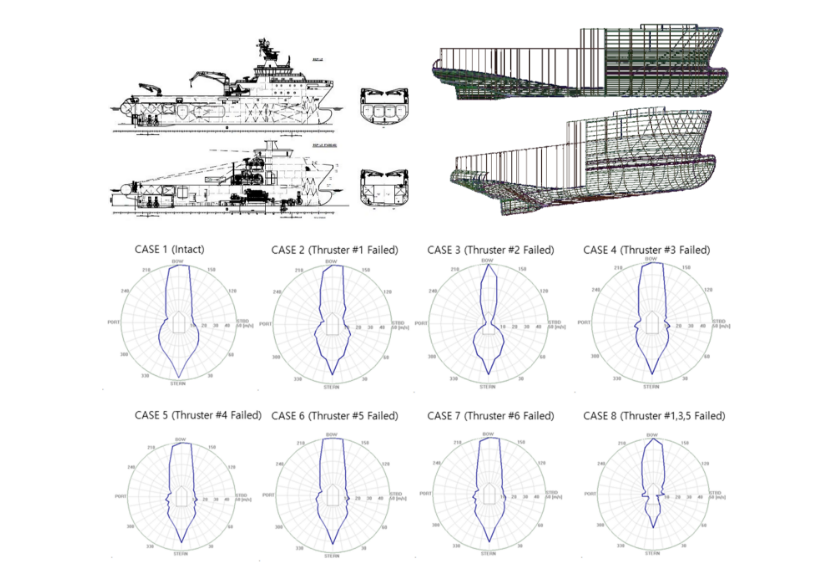
또한 전통적인 DP 성능 평가에 관한 부분도 수행하고 있습니다. DP 시스템을 장착한 부유체는 여러 가지 기준에 의해 위치 유지 성능을 평가하게 됩니다. 가장 일반적인 방법은 아래에 나타난 바와 같이 Capability plot을 작성하는 것입니다. 여러 가지 고장상황을 고려하여 어느 정도의 환경하중에 대응할 수 있는 지를 도표로 표현하는 것입니다. 본 연구실에서 수행한 AHTS (Anchor Handling Tug Supplier)에 대한 성능평가의 예가 다음과 같습니다.
Offshore drilling system
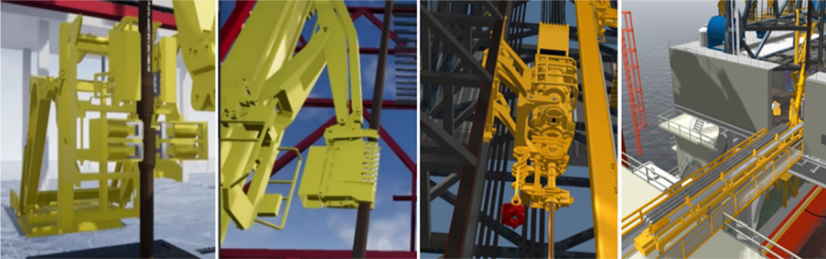
해양시추시스템의 개발과 관련한 연구를 수행하고 있습니다. 기자재의 국산화를 위해 필요한 핵심기술을 분석하고, 지원하기 위한 시스템을 개발합니다. 해양시추선의 Drill floor에 탑재되는 대형 장비들에 대해 3D 모델링을 수행하고, 각 장비간의 충돌 여부를 검사하여 운영시스템에 전달하는 시스템을 개발하고 있습니다.
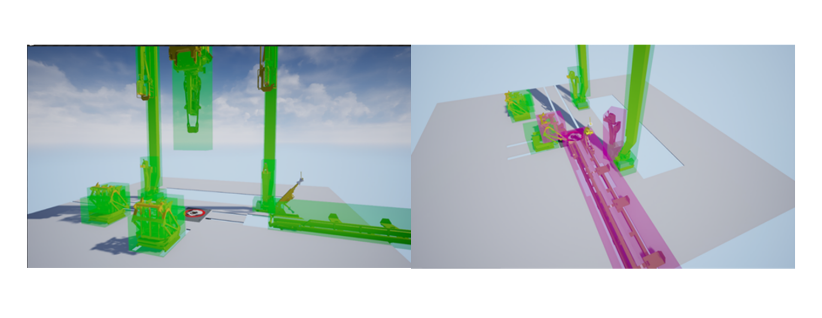
시추네트워크로부터 장비의 상태를 전달받아 데이터를 처리하여 충돌을 검사하고, 그 결과를 시추제어시스템으로 전달하고 ACS Viewer에서 자체적으로 가시화하는 작업을 진행합니다.
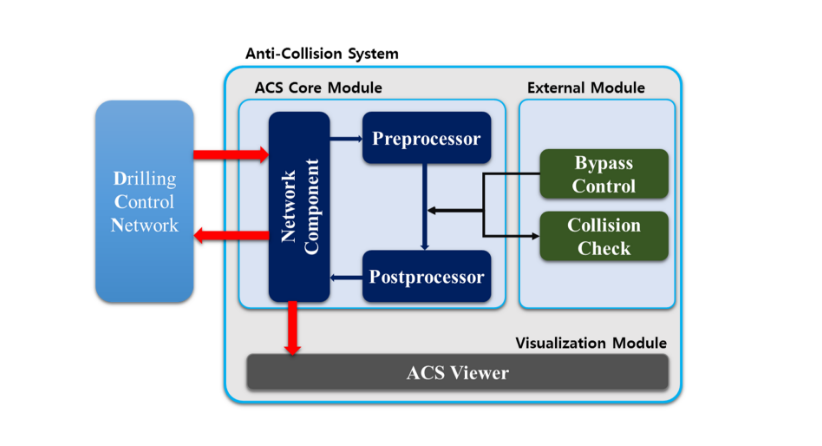
Viewer는 Unreal 엔진을 사용하고 있습니다.
Autonomous surface vehicles
무인 수상정의 군집 제어와 관련한 사항을 연구하고 있습니다. 여러 대의 무인 선박들을 이용하여 다양한 미션을 수행할 수 있도록 플랫폼과 군집 제어 방법을 개발하고 있습니다.

한화시스템 무인수상정 군집 운용 예상도

LIG 넥스원 무인수상정 ‘해검’
위치 및 지도교수
- 위치: 공과대학 206-B호
- 지도교수: 이재용 교수
보유시설 및 장비
- STR 선박 운항 시뮬레이터
- 해양 시추 설비 시뮬레이터
- 해양시스템 운동 해석용 워크스테이션